香港大學(港大)機械工程系郭嘉威教授率領的團隊,於磁力共振成像(MRI)引導的立體定位神經外科手術領域取得重要突破。
郭嘉威教授的工程團隊於2018年發表全球首個在磁力共振環境內進行雙邊立體定位手術的機械人,成功克服了手術時間長和工作流程複雜的挑戰。今次團隊在2018年的基礎上對原型進行了重大更新,研發的互動式多階段以MRI引導立體定位神經外科手術的機械人定位器,可協助進行導管/ 針頭的精準介入操作,適用於治療動作障礙(如柏金遜症)等的深腦刺激手術(DBS);以及協助在深腦位置進行活檢、注射、消融和導管放置等操作,滿足各種治療需求。
研究結果已於《Advanced Science》期刊上發表。新系統已通過人體標本及於頭骨模型上進行的可行性測試。系統實現了誤差少於3毫米的高精確度,有巨大潛力應用於臨床手術上。此項發明已申請專利並受知識產權保護。
新系統與香港大學李嘉誠醫學院臨床醫學學院外科學系臨床教授潘偉生教授、香港中文大學醫學院外科學系腦外科組名譽臨床副教授陳達明醫生共同開發。港大工程團隊成員包括唐漢昇、方格、張霑利,博士生戴敬、以及研究員何焯亮、王曉梅和何迪朗。
新MRI機械人定位器實現了兩個使用階段的半自動操作:
第1階段)外科醫生進行手動調節
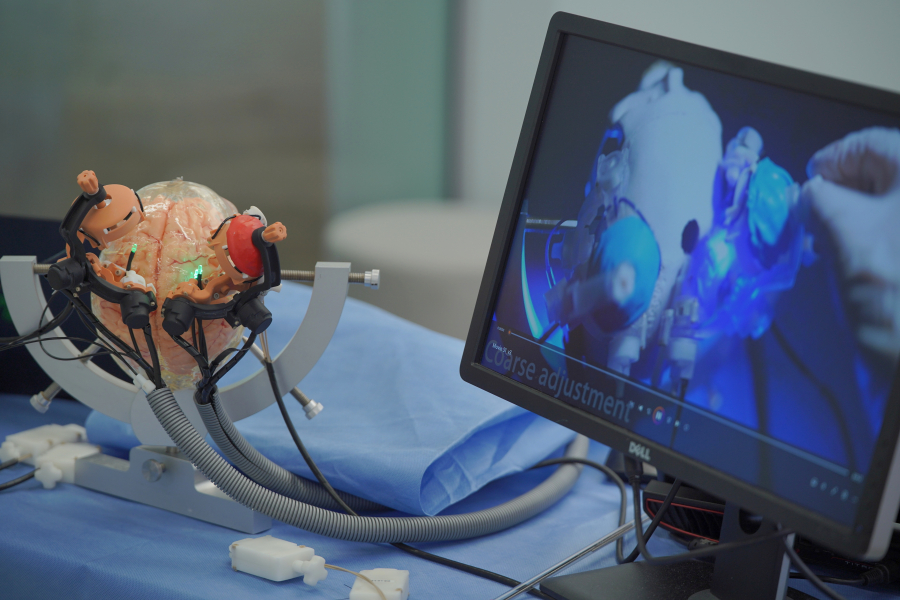
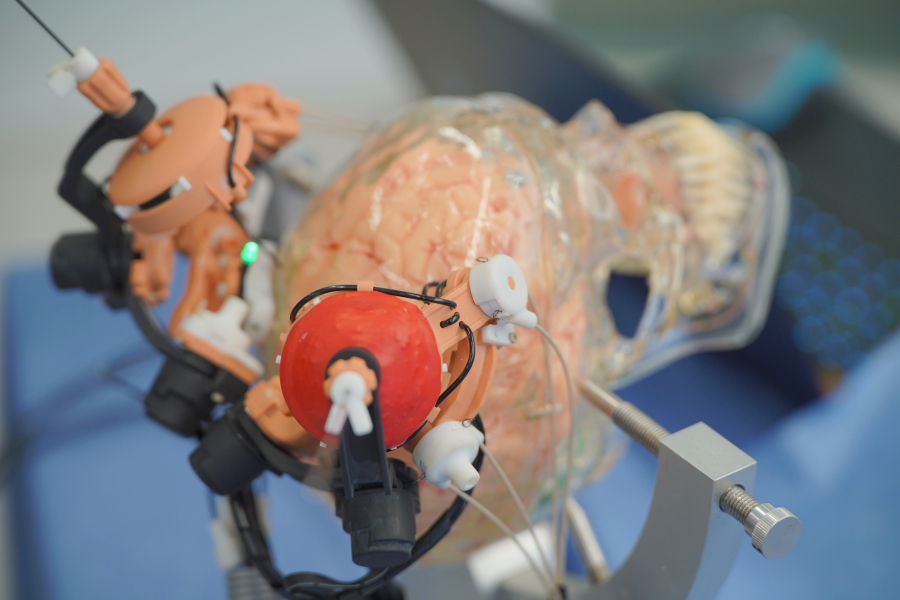
根據術前圖像,外科醫生將機械人定位器按已計劃的軌跡定向。系統內置的照明指示燈會實時自動顯示與計劃軌跡之間的角度誤差。當定位器接近計劃軌跡誤差少於5°時定位會被遙距鎖定。
第2階段)通過精確、靈敏和高解像度的軟體機械人定位,自動微調
利用基於有限元分析(FEA)的設計和流體驅動柔性致動器結構的優化,儀器可以少於0.2°的定位誤差準確定位。
然後,外科醫生通過機械人儀器導向器手動插入儀器。而其深度鎖止器可輔助設定器械探入的深度。新研發的系統可以消除傳統基於框架的立體定位手術中的固有誤差。因此,探針/電極儀器插入精確度將增加,確保手術結果的安全性。系統將縮短手術時間,提高患者的舒適感和滿意度。
請按此觀看短片了解互動式多階段機械人定位器的工作原理。
安裝於頭骨上的機械人保持結構輕巧,重量輕(203克)且體積小(直徑97 × 81毫米)的設計;適用於大部分標準造影頭部線圈。整個系統由適用於磁力共振兼容的材料製成,不會產生電磁干擾,而且結合了特別設計的微型無線全向追蹤標記,實現實時MRI下的機械人定向及定位。
由郭嘉威教授領導的工程團隊,擅於將技術創新轉化為實際應用。在港大技術轉移處(TTO)的支持下,團隊的6項知識產權已轉讓/授權予不同的商業夥伴作研發用途,完成重要的里程碑。其中團隊研發用於內窺鏡手術柔性微型機械人系統,經港大以及香港科學園孵化的公司,已經獲得了1,700萬美元的投資,用於商業化的發展。
請按此查看已發表在《Advanced Science》期刊上的研究論文,標題為「Interactive Multi-stage Robotic Positioner for Intra-operative MRI-guided Stereotactic Neurosurgery」。
請按此瀏覽新聞發佈會投影片。
傳媒查詢:
工程學院
鍾廸施女士 (電郵:btschung@hku.hk) 或
鍾敏芝女士 (電話:3910 3324;電郵:chungmc@hku.hk)或
賴健聰女士 (電話:3917 1924;電郵:chariskc@hku.hk)