A research team led by Professor Ka-Wai Kwok from the Department of Mechanical Engineering at the University of Hong Kong (HKU) has developed an interactive multi-stage robotic positioner specifically designed for magnetic resonance imaging (MRI)-guided stereotactic neurosurgery.
This groundbreaking technology represents a key breakthrough in MRI-guided stereotactic neurosurgery, allowing for precise interventions. The system is capable of assisting with interventions involving cannula/needle targeting including deep brain stimulation (DBS), for the treatment of movement disorders like Parkinson’s disease. It also facilitates a wide range of therapeutic applications such as biopsy, drug delivery, ablation, and catheter placement within deep brain regions.
In 2018, Professor Kwok’s team successfully created the world’s first robotic system capable of performing bilateral stereotactic neurosurgery in an MRI environment, addressing the challenges of long procedural times and complicated workflow. Collaborating with clinical experts Professor Wai-Sang Poon from the Department of Surgery at HKU, and Dr Danny Tat Ming Chan from the Division of Neurosurgery, Department of Surgery at CUHK, the team has further refined the initial prototype. The system developed has been validated through cadaveric studies and skull model testing, achieving a precision error of less than 3 mm and demonstrating immense potential for integration into clinical practice. A patent has been applied for the invention.
The HKU Engineering team includes: Hon-Sing Tong, Ge Fang, Chim-Lee Cheung, PhD student: Jing Dai, as well as research fellows: Zhuoliang He, Xiaomei Wang and Justin D.L. Ho.
The updated prototype has been published in the journal Advanced Science. The latest development of the system enables interactive, semi-automatic manipulation in two stages:
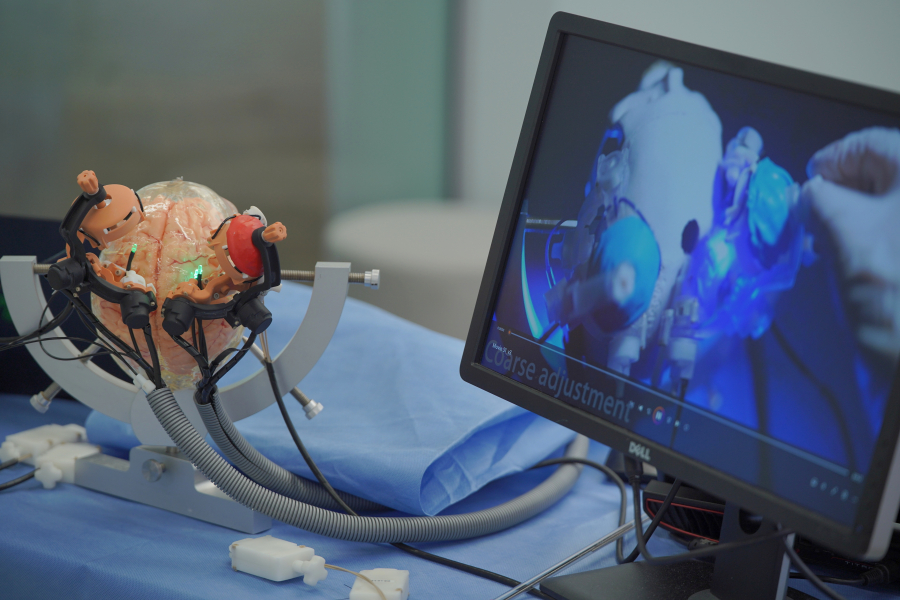
Stage 1) Manual coarse adjustment performed interactively by surgeon
Based on pre-operative images, the surgeon orients the robot instrument guide towards the direction of the planned trajectory. Fibre-optic lighting built into the system intuitively indicates the angulation error with reference to the planned trajectory. Once the instrument guide is close to the planned trajectory with an error less than 5°, the system will be remotely locked.
Stage 2) Automatic fine adjustment with precise, responsive, and high-resolution soft robotic positioning
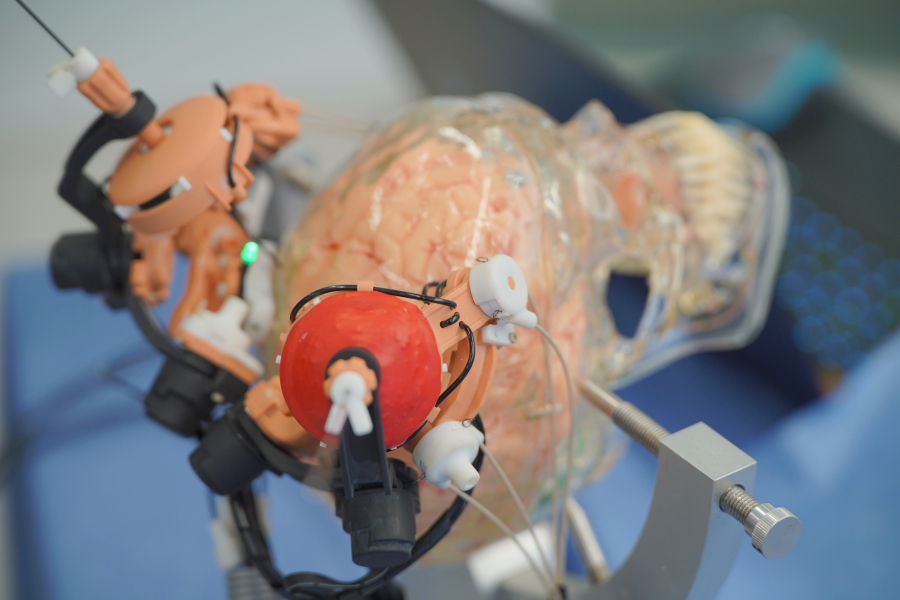
Making use of finite element analysis (FEA)- based design and optimisation of the fluid-driven soft actuator architecture, the instrument could be positioned accurately with <0.2° orientation error. Robust orientation locking is achieved through soft robotic mechanisms such as tendon-driven baking units and granular jamming across the stages.
The surgeon then manually inserts the instrument via the robot instrument guide. The insertion depth is set with the assistance of a stopper. The system can eliminate the intrinsic errors in conventional frame-based stereotaxis. As a result, insertion precision will increase, securing surgical outcomes. The shorter operation time will help to improve patient comfort and satisfaction.
Please click here for a video to illustrate how the multi-stage robotic positioner works.
The compact and lightweight skull-mounted robot (97 x 81 mm, 203g) is designed to fit most standard imaging head coils. It features custom-made miniature wireless omni-directional tracking markers and a zero-electromagnetic-interference system to facilitate robot registration under real-time MRI.
Led by Professor Ka-Wai Kwok, the Engineering team at HKU excels in translating technological innovations into practical applications. With support from HKU's Technology Transfer Office (TTO), they have transferred and licensed six IPs to industrial partners, reaching significant milestones. Notably, their flexible miniaturised robotic system for endoscopic surgery has led to the formation of an HKU and Hong Kong Science and Technology Parks incubated company, which has secured USD$17M in venture capital for commercialisation and further development.
Please click here for the article entitled “Interactive Multi-stage Robotic Positioner for Intra-operative MRI-guided Stereotactic Neurosurgery”, published in Advanced Science.
For the powerpoint slides shown in the media conference, please click here.
Media Enquiry:
Faculty of Engineering
Ms Becky Chung (Email: btschung@hku.hk) or
Ms Christina Chung (Tel: 39103324; Email: chungmc@hku.hk) or
Ms Charis Lai (Email: chariskc@hku.hk)